
 免费 AI IDE
免费 AI IDE
C++DP解题思路
上两节介绍了动态规划问题的主要特征,接下来我们一起探究两个更加实用的问题。
- 如何判断一个问题是不是动态规划问题?
- 求解动态规划问题该从何处入手,完整步骤是什么?
14.3.1 问题判断
总的来说,如果一个问题包含重叠子问题、最优子结构,并满足无后效性,那么它通常就适合用动态规划求解。然而,我们很难从问题描述上直接提取出这些特性。因此我们通常会放宽条件,先观察问题是否适合使用回溯(穷举)解决。
适合用回溯解决的问题通常满足“决策树模型”,这种问题可以使用树形结构来描述,其中每一个节点代表一个决策,每一条路径代表一个决策序列。
换句话说,如果问题包含明确的决策概念,并且解是通过一系列决策产生的,那么它就满足决策树模型,通常可以使用回溯来解决。
在此基础上,动态规划问题还有一些判断的“加分项”。
- 问题包含最大(小)或最多(少)等最优化描述。
- 问题的状态能够使用一个列表、多维矩阵或树来表示,并且一个状态与其周围的状态存在递推关系。
相应地,也存在一些“减分项”。
- 问题的目标是找出所有可能的解决方案,而不是找出最优解。
- 问题描述中有明显的排列组合的特征,需要返回具体的多个方案。
如果一个问题满足决策树模型,并具有较为明显的“加分项“,我们就可以假设它是一个动态规划问题,并在求解过程中验证它。
14.3.2 问题求解步骤
动态规划的解题流程会因问题的性质和难度而有所不同,但通常遵循以下步骤:描述决策,定义状态,建立
为了更形象地展示解题步骤,我们使用一个经典问题“最小路径和”来举例。
Question
给定一个 grid ,网格中的每个单元格包含一个非负整数,表示该单元格的代价。机器人以左上角单元格为起始点,每次只能向下或者向右移动一步,直至到达右下角单元格。请返回从左上角到右下角的最小路径和。
图 14-10 展示了一个例子,给定网格的最小路径和为
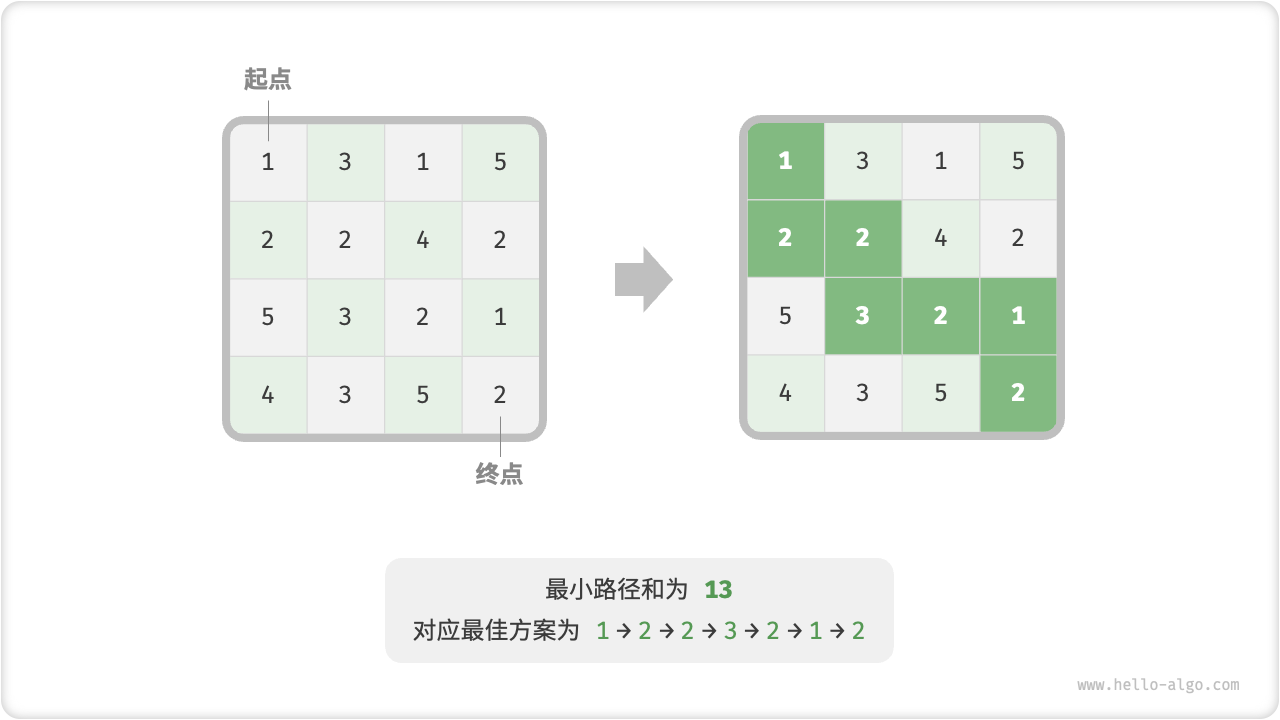
图 14-10 最小路径和示例数据
第一步:思考每轮的决策,定义状态,从而得到
本题的每一轮的决策就是从当前格子向下或向右一步。设当前格子的行列索引为
状态
至此,我们就得到了图 14-11 所示的二维

图 14-11 状态定义与 dp 表
Note
动态规划和回溯过程可以被描述为一个决策序列,而状态由所有决策变量构成。它应当包含描述解题进度的所有变量,其包含了足够的信息,能够用来推导出下一个状态。
每个状态都对应一个子问题,我们会定义一个
第二步:找出最优子结构,进而推导出状态转移方程
对于状态
根据以上分析,可推出图 14-12 所示的状态转移方程:
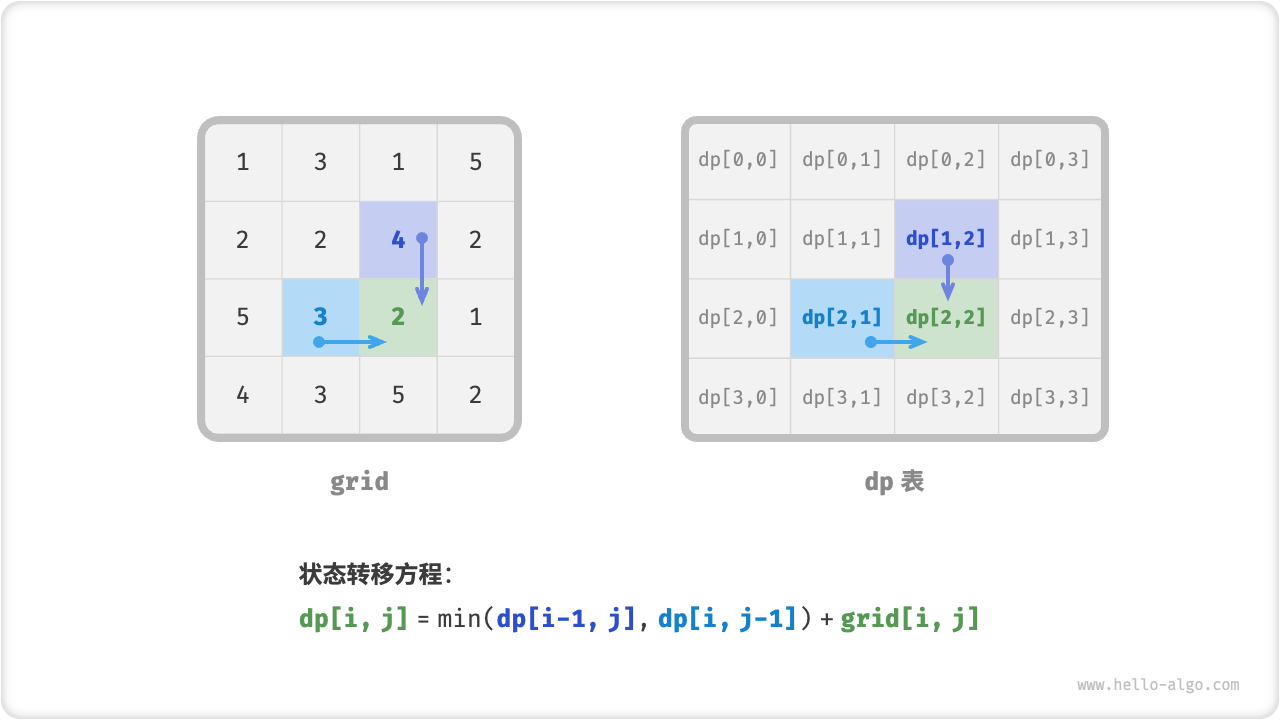
图 14-12 最优子结构与状态转移方程
Note
根据定义好的
一旦我们找到了最优子结构,就可以使用它来构建出状态转移方程。
第三步:确定边界条件和状态转移顺序
在本题中,首行的状态只能从其左边的状态得来,首列的状态只能从其上边的状态得来,因此首行
如图 14-13 所示,由于每个格子是由其左方格子和上方格子转移而来,因此我们使用采用循环来遍历矩阵,外循环遍历各行、内循环遍历各列。
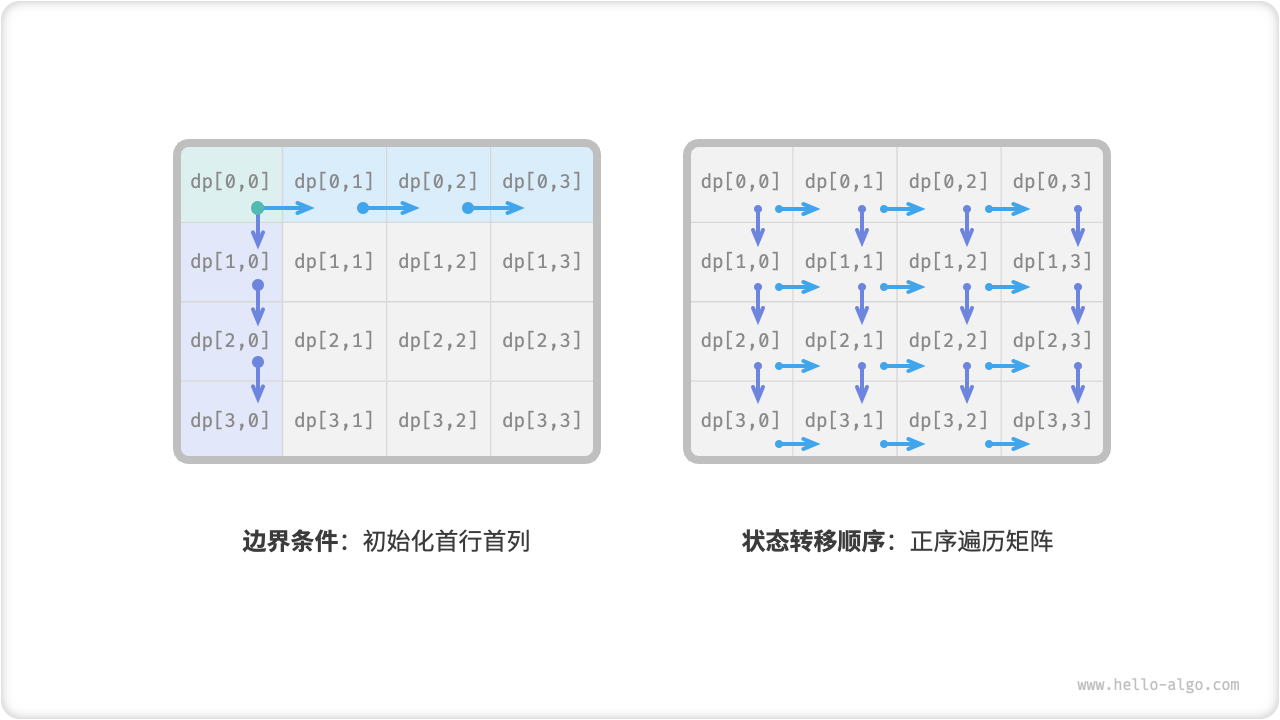
图 14-13 边界条件与状态转移顺序
Note
边界条件在动态规划中用于初始化
状态转移顺序的核心是要保证在计算当前问题的解时,所有它依赖的更小子问题的解都已经被正确地计算出来。
根据以上分析,我们已经可以直接写出动态规划代码。然而子问题分解是一种从顶至底的思想,因此按照“暴力搜索
1. 方法一:暴力搜索
从状态
- 递归参数:状态
- 返回值:从
- 终止条件:当
- 剪枝:当
min_path_sum.cpp
/* 最小路径和:暴力搜索 */
int minPathSumDFS(vector<vector<int>> &grid, int i, int j) {
// 若为左上角单元格,则终止搜索
if (i == 0 && j == 0) {
return grid[0][0];
}
// 若行列索引越界,则返回 +∞ 代价
if (i < 0 || j < 0) {
return INT_MAX;
}
// 计算从左上角到 (i-1, j) 和 (i, j-1) 的最小路径代价
int left = minPathSumDFS(grid, i - 1, j);
int up = minPathSumDFS(grid, i, j - 1);
// 返回从左上角到 (i, j) 的最小路径代价
return min(left, up) != INT_MAX ? min(left, up) + grid[i][j] : INT_MAX;
}图 14-14 给出了以 grid 的尺寸变大而急剧增多。
本质上看,造成重叠子问题的原因为:存在多条路径可以从左上角到达某一单元格。
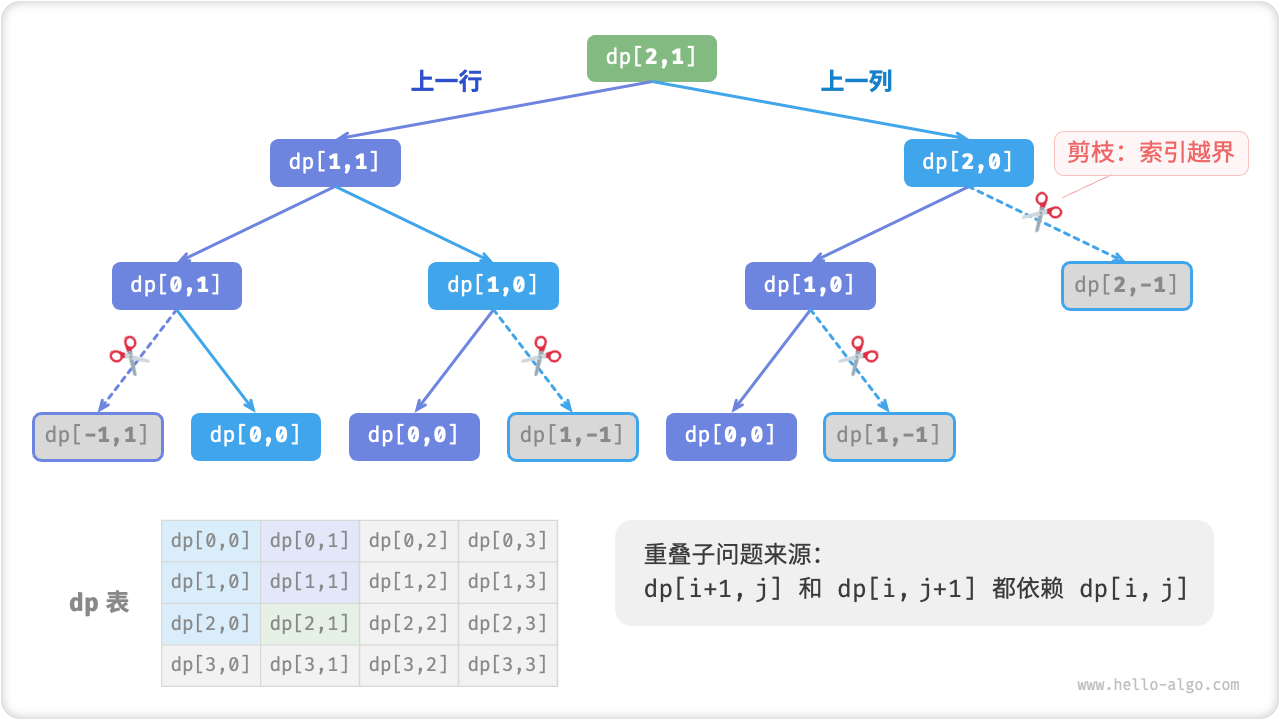
图 14-14 暴力搜索递归树
每个状态都有向下和向右两种选择,从左上角走到右下角总共需要
2. 方法二:记忆化搜索
我们引入一个和网格 grid 相同尺寸的记忆列表 mem ,用于记录各个子问题的解,并将重叠子问题进行剪枝。
min_path_sum.cpp
/* 最小路径和:记忆化搜索 */
int minPathSumDFSMem(vector<vector<int>> &grid, vector<vector<int>> &mem, int i, int j) {
// 若为左上角单元格,则终止搜索
if (i == 0 && j == 0) {
return grid[0][0];
}
// 若行列索引越界,则返回 +∞ 代价
if (i < 0 || j < 0) {
return INT_MAX;
}
// 若已有记录,则直接返回
if (mem[i][j] != -1) {
return mem[i][j];
}
// 左边和上边单元格的最小路径代价
int left = minPathSumDFSMem(grid, mem, i - 1, j);
int up = minPathSumDFSMem(grid, mem, i, j - 1);
// 记录并返回左上角到 (i, j) 的最小路径代价
mem[i][j] = min(left, up) != INT_MAX ? min(left, up) + grid[i][j] : INT_MAX;
return mem[i][j];
}如图 14-15 所示,在引入记忆化后,所有子问题的解只需计算一次,因此时间复杂度取决于状态总数,即网格尺寸

图 14-15 记忆化搜索递归树
3. 方法三:动态规划
基于迭代实现动态规划解法。
min_path_sum.cpp
/* 最小路径和:动态规划 */
int minPathSumDP(vector<vector<int>> &grid) {
int n = grid.size(), m = grid[0].size();
// 初始化 dp 表
vector<vector<int>> dp(n, vector<int>(m));
dp[0][0] = grid[0][0];
// 状态转移:首行
for (int j = 1; j < m; j++) {
dp[0][j] = dp[0][j - 1] + grid[0][j];
}
// 状态转移:首列
for (int i = 1; i < n; i++) {
dp[i][0] = dp[i - 1][0] + grid[i][0];
}
// 状态转移:其余行列
for (int i = 1; i < n; i++) {
for (int j = 1; j < m; j++) {
dp[i][j] = min(dp[i][j - 1], dp[i - 1][j]) + grid[i][j];
}
}
return dp[n - 1][m - 1];
}图 14-16 展示了最小路径和的状态转移过程,其遍历了整个网格,因此时间复杂度为
数组 dp 大小为
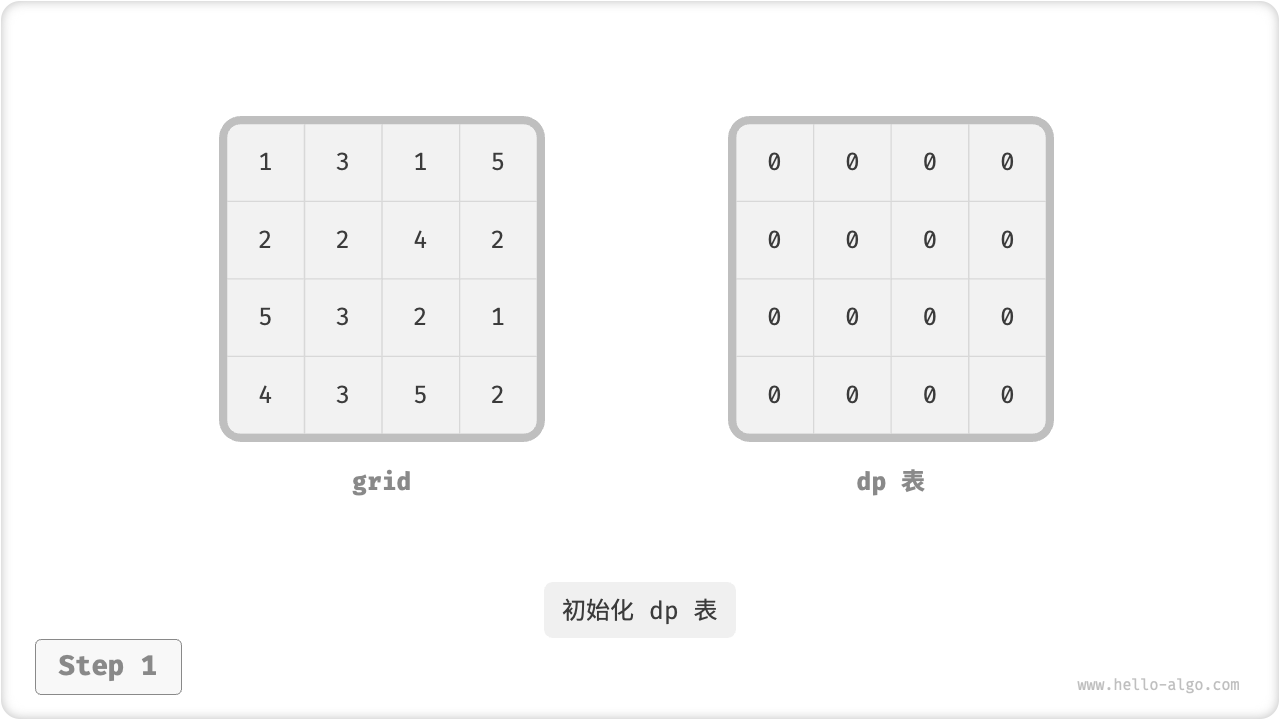
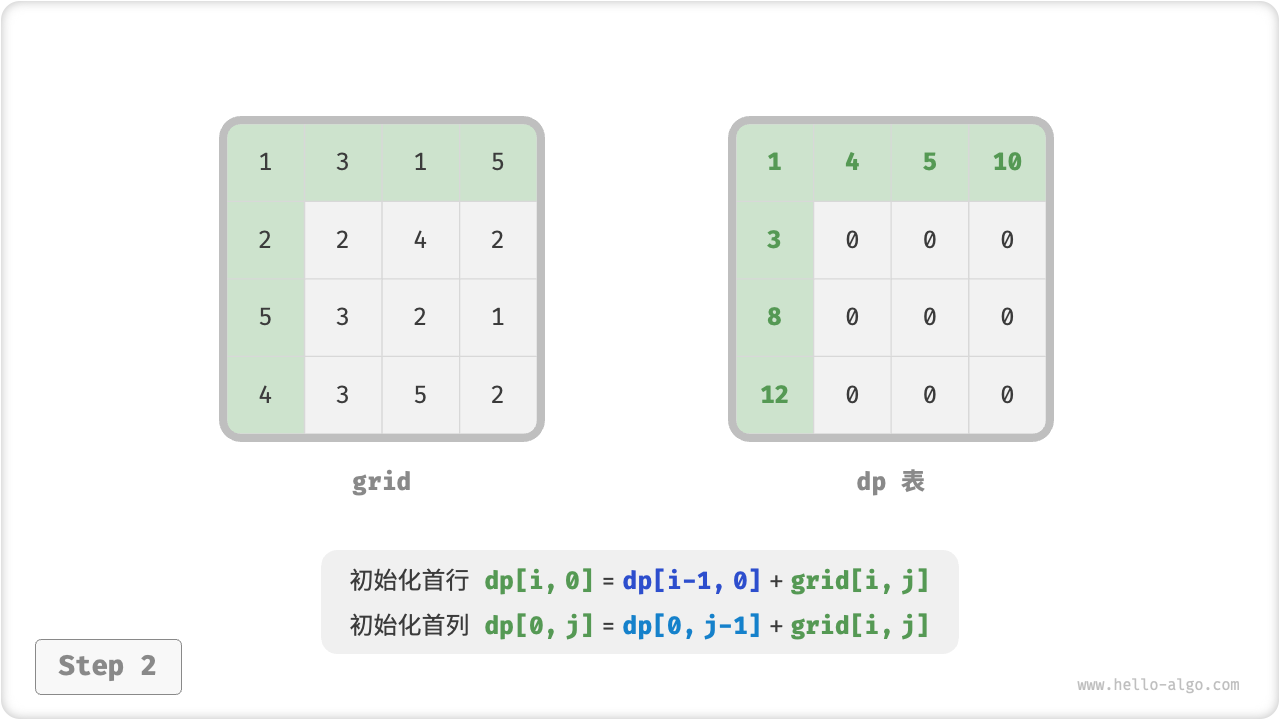
图 14-16 最小路径和的动态规划过程
4. 空间优化
由于每个格子只与其左边和上边的格子有关,因此我们可以只用一个单行数组来实现
请注意,因为数组 dp 只能表示一行的状态,所以我们无法提前初始化首列状态,而是在遍历每行中更新它。
min_path_sum.cpp
/* 最小路径和:空间优化后的动态规划 */
int minPathSumDPComp(vector<vector<int>> &grid) {
int n = grid.size(), m = grid[0].size();
// 初始化 dp 表
vector<int> dp(m);
// 状态转移:首行
dp[0] = grid[0][0];
for (int j = 1; j < m; j++) {
dp[j] = dp[j - 1] + grid[0][j];
}
// 状态转移:其余行
for (int i = 1; i < n; i++) {
// 状态转移:首列
dp[0] = dp[0] + grid[i][0];
// 状态转移:其余列
for (int j = 1; j < m; j++) {
dp[j] = min(dp[j - 1], dp[j]) + grid[i][j];
}
}
return dp[m - 1];
}

更多建议: